Yuxing Wang, Shuang Wu, Tiantian Zhang, Yongzhe Chang, Qiang Fu, Haobo Fu, Xueqian Wang
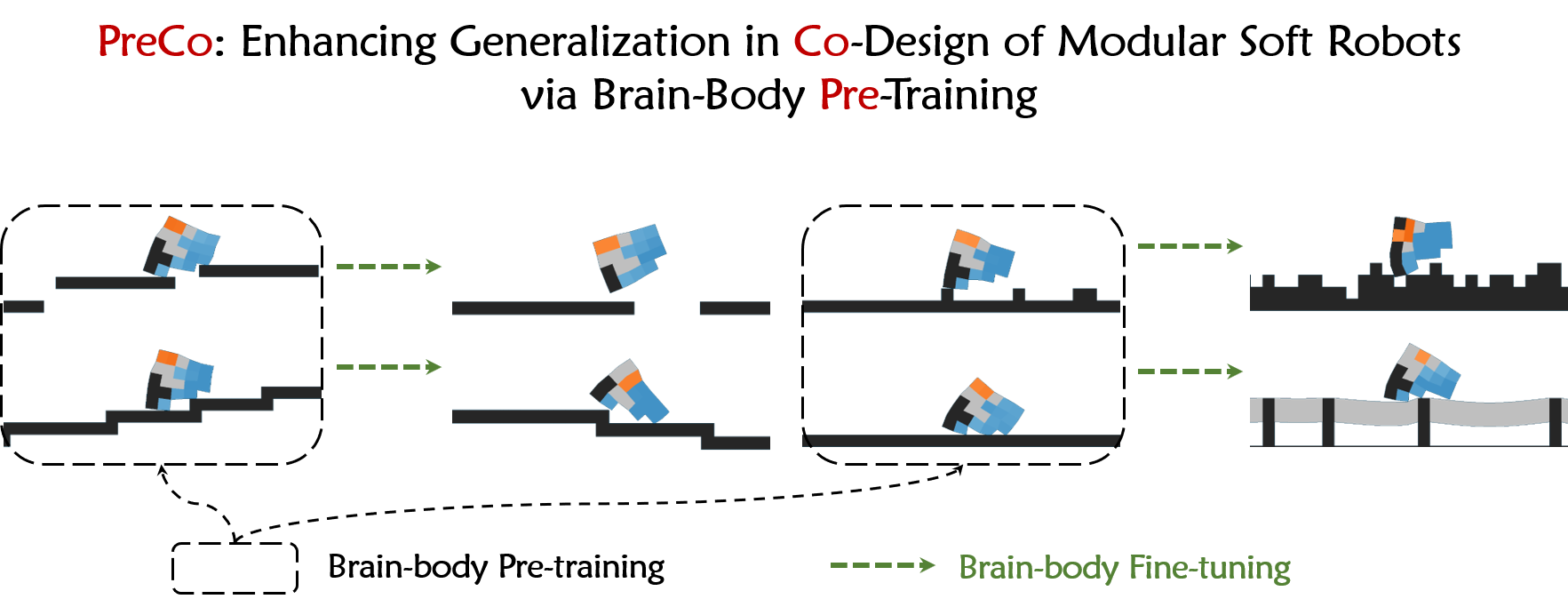
Abstract: Brain-body co-design, which involves the collaborative design of control strategies and morphologies, has emerged as a promising approach to enhance a robot's adaptability to its environment. However, the conventional co-design process often starts from scratch, lacking the utilization of prior knowledge. This can result in time-consuming and costly endeavors. In this paper, we present PreCo, a novel methodology that efficiently integrates brain-body pre-training into the co-design process of modular soft robots. PreCo is based on the insight of encoding co-design principles into models, achieved by pre-training a pleiotropic co-design policy on a diverse set of tasks. The pre-trained co-designer is utilized to generate initial designs and control policies and then fine-tune them for a specific co-design task. Through experiments on a modular soft robot system, our method demonstrates zero-shot generalization to unseen co-design tasks and enables rapid adaptation with significantly reduced policy iterations.
Bibtex
@inproceedings{
wang2023preco,
title={PreCo: Enhancing Generalization in Co-Design of Modular Soft Robots via Brain-Body Pre-Training},
author={Yuxing Wang and Shuang Wu and Tiantian Zhang and Yongzhe Chang and QIANG FU and Haobo Fu and Xueqian Wang},
booktitle={7th Annual Conference on Robot Learning},
year={2023},
url={https://openreview.net/forum?id=E2vL12SwO1}
}
🎦Video