
您好 · Привет · Hello · Bonjour · Ciao · こんにちは · 안녕하세요 · Hallo · Hola
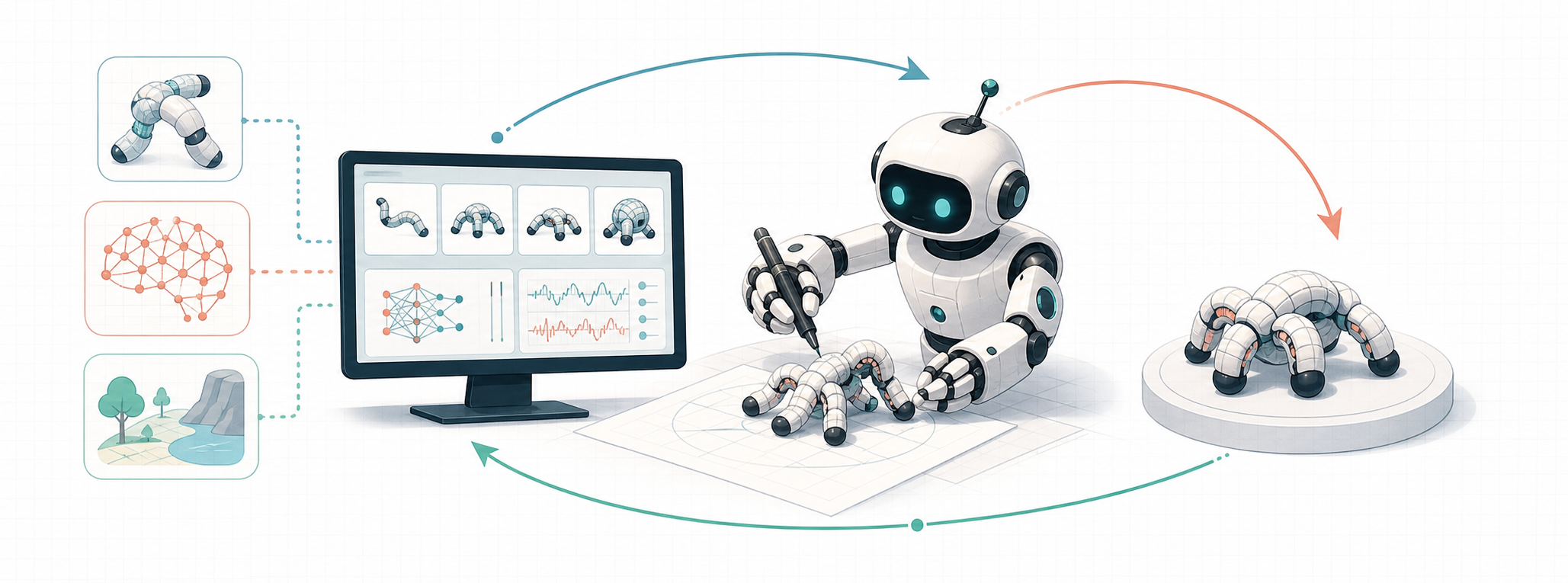
Designing machines that design machines.
I am Yuxing Wang, a researcher working on Embodied Co-Design, Robot Learning, and Agentic AI.
My work is driven by a fascination with systems that can move, adapt, and eventually participate in their own design. I study how learning algorithms, physical morphology, and environmental structure can be optimized together, so embodied agents are not only structurally feasible but behaviorally capable.
Biography
I earned my B.Eng. from Southwest Minzu University in 2020 and my M.Eng. from Tsinghua University in 2023, advised by Prof. Xueqian Wang. I am now pursuing a Ph.D. in Control Science and Engineering at Tsinghua.
During my 2022-2023 research internship at Tencent AI Lab, supported by the Tencent Rhino-Bird Research Elite Program, I worked with Shuang Wu and Haobo Fu on user-specified behavioral diversity for Game AI.
Research Style
I like research that is visual, physical, and a little stubborn: systems should move, fail, improve, and eventually reveal a design principle.
Outside the lab, I recharge with Hikaru Utada, comedies, and talk shows.
| May 30, 2026 | One paper was accepted to PPSN 2026. |
|---|---|
| Mar 21, 2026 | One paper was accepted to GECCO 2026. |
| Dec 01, 2025 | Our survey “Embodied Co-Design for Rapidly Evolving Agents: Taxonomy, Frontiers, and Challenges” is publicly available on arXiv! |
| Aug 01, 2025 | Served as a reviewer for ICLR 2026 and AAAI 2026. |
| May 01, 2025 | Two papers were accepted to the International Astronautical Congress (IAC) 2025. See you in Sydney, Australia! |
| Mar 10, 2025 | Served as a program committee member for NeurIPS 2025 and ACM MM 2025. |
| Jan 01, 2025 | A website for our survey “Embodied Co-Design for Rapidly Evolving Agents: Taxonomy, Frontiers, and Challenges” has been created. The repo will be updated on a regular basis! The full paper will be posted to arXiv soon! |
MIT Technology Review China coverage
我设计我自己!清华最新研究:未来机器人不用人设计,AI直接捏出最优形态
- TNNLS
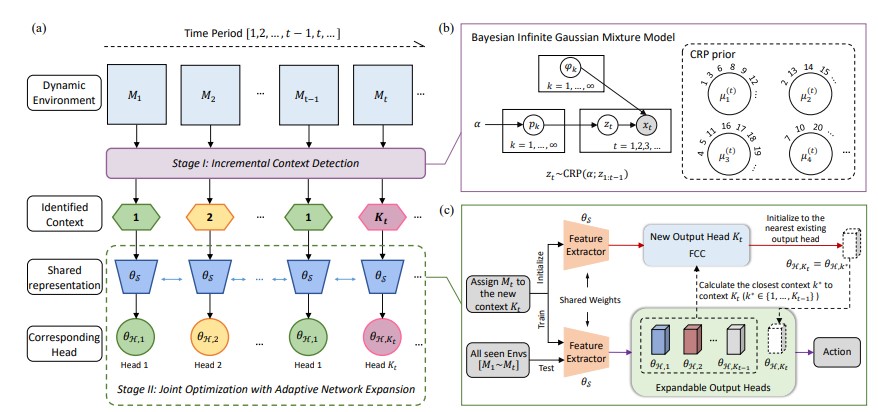 Dynamics-adaptive continual reinforcement learning via progressive contextualizationIEEE Transactions on Neural Networks and Learning Systems (TNNLS), 2023
Dynamics-adaptive continual reinforcement learning via progressive contextualizationIEEE Transactions on Neural Networks and Learning Systems (TNNLS), 2023 - CoRL
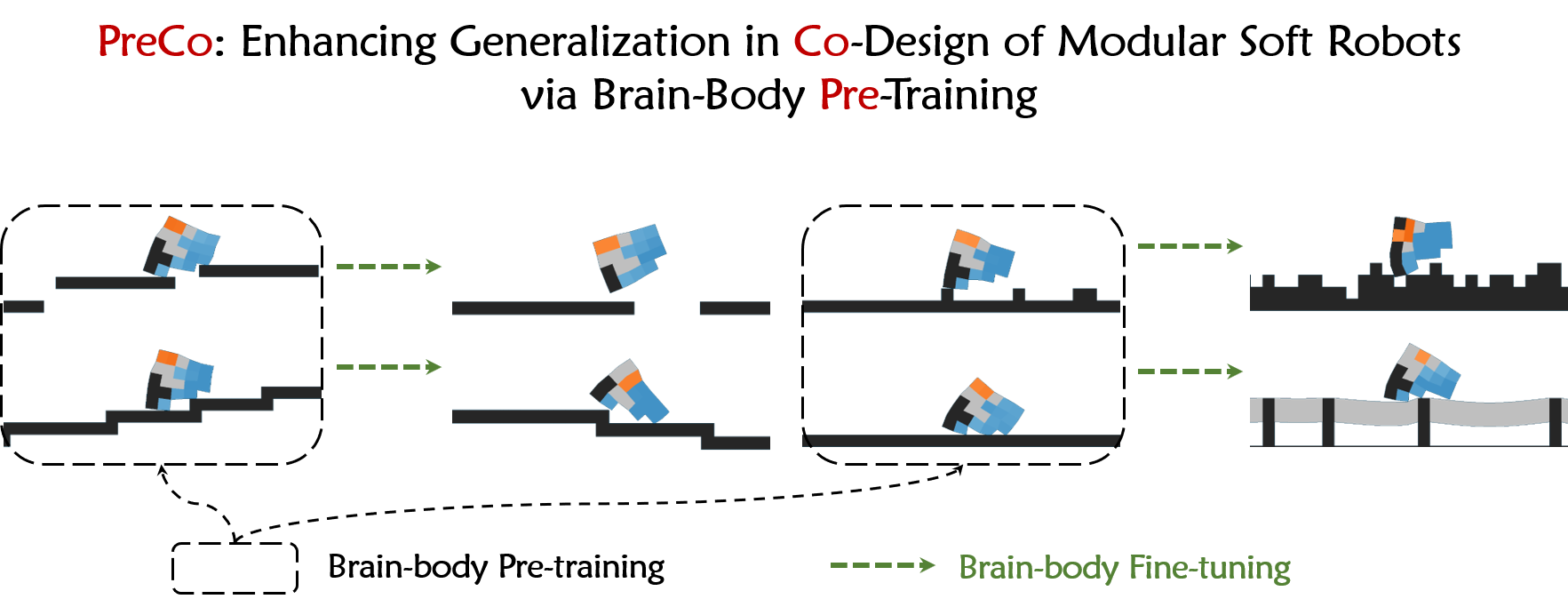 PreCo: Enhancing Generalization in Co-Design of Modular Soft Robots via Brain-Body Pre-TrainingIn Conference on Robot Learning (CoRL) , 2023
PreCo: Enhancing Generalization in Co-Design of Modular Soft Robots via Brain-Body Pre-TrainingIn Conference on Robot Learning (CoRL) , 2023 - ICLR
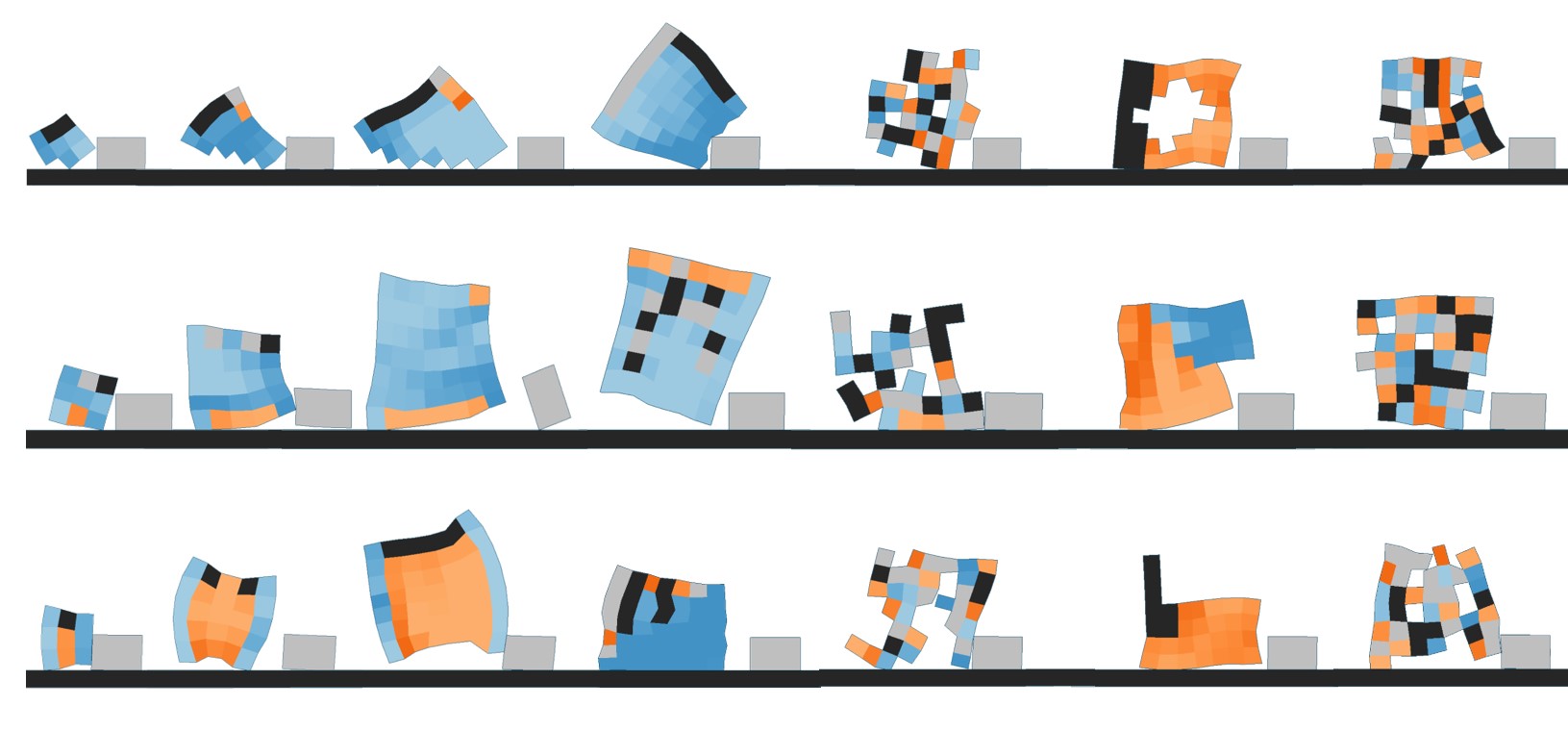
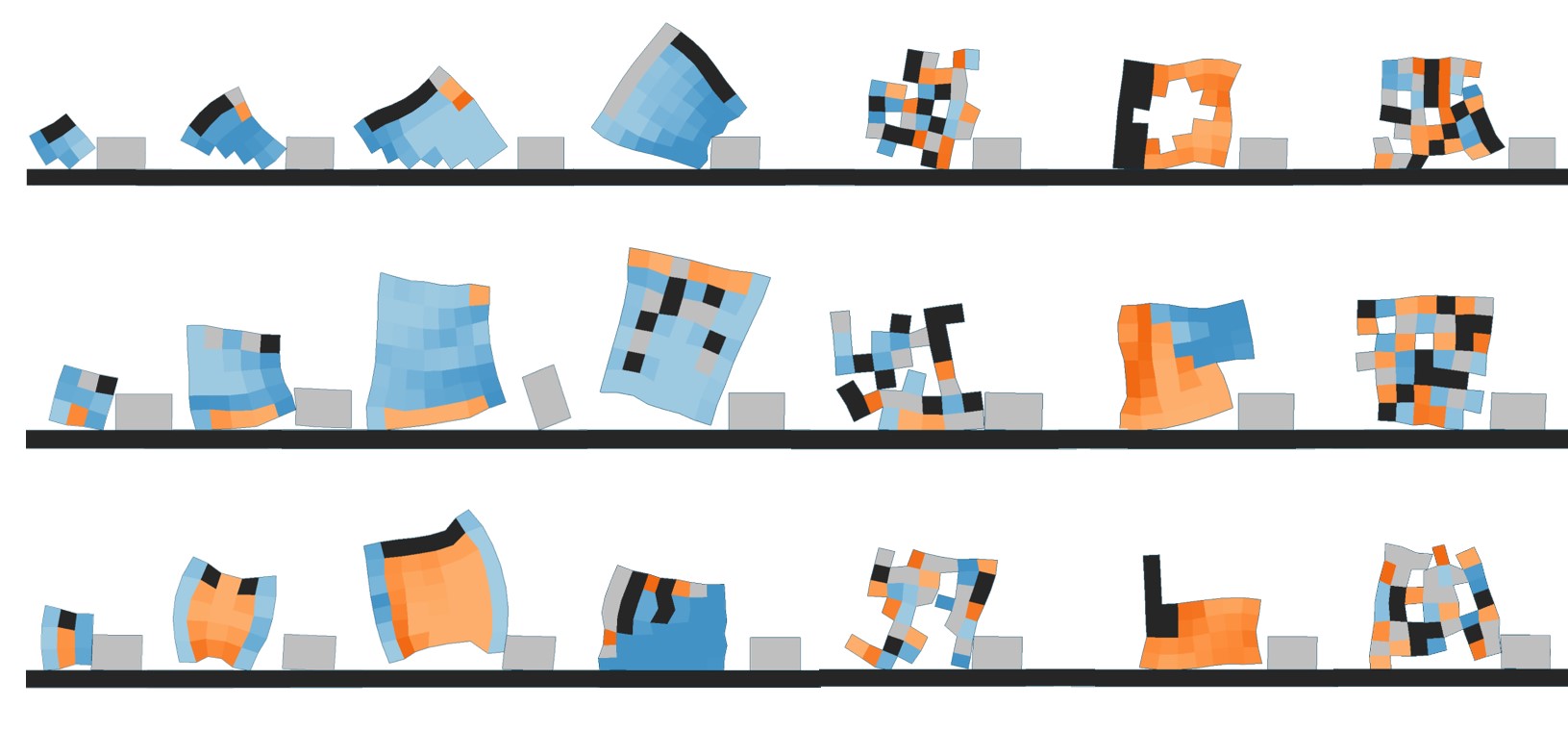 Curriculum-based co-design of morphology and control of voxel-based soft robotsIn The Eleventh International Conference on Learning Representations (ICLR) , 2023
Curriculum-based co-design of morphology and control of voxel-based soft robotsIn The Eleventh International Conference on Learning Representations (ICLR) , 2023 - InS
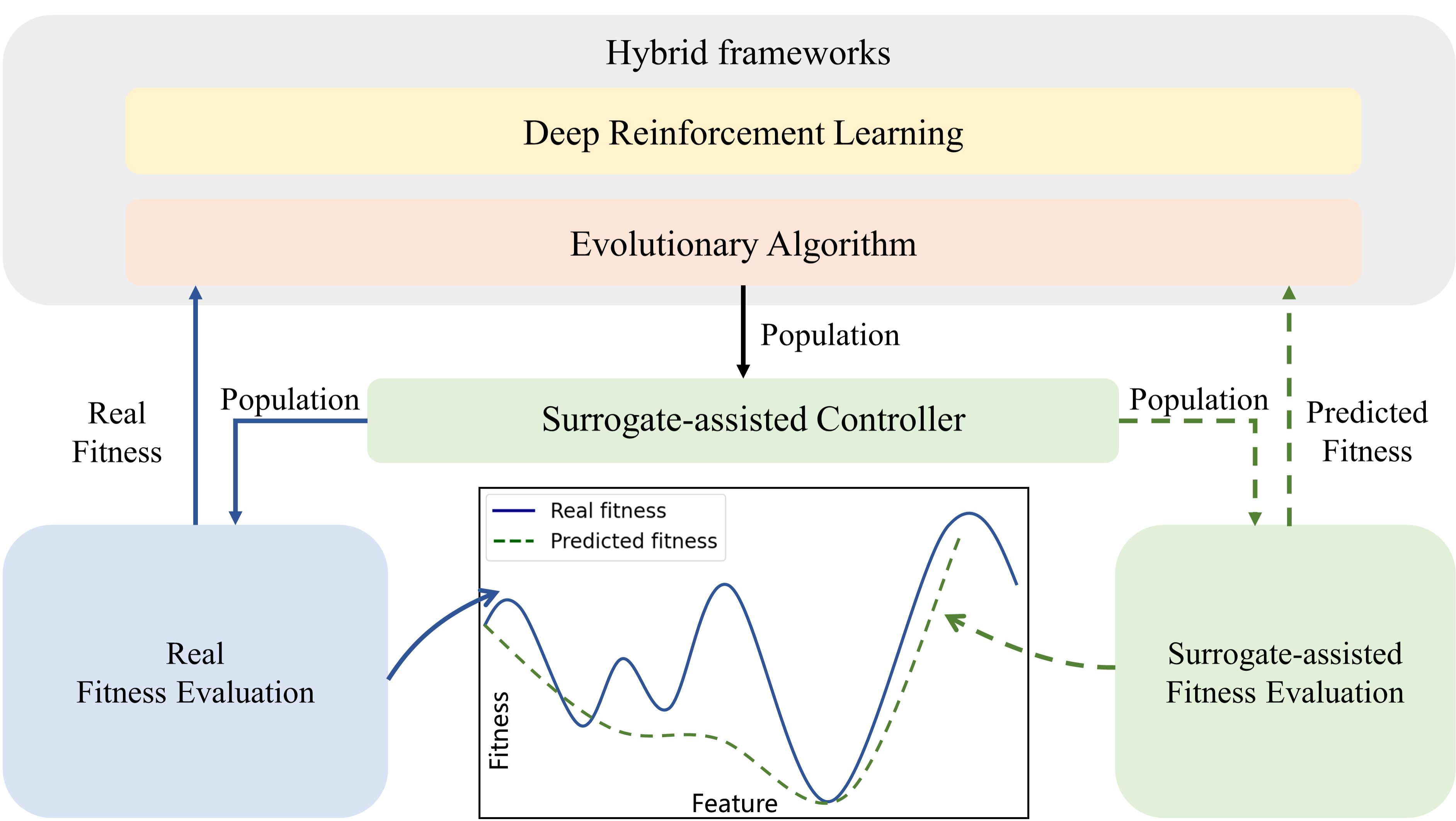
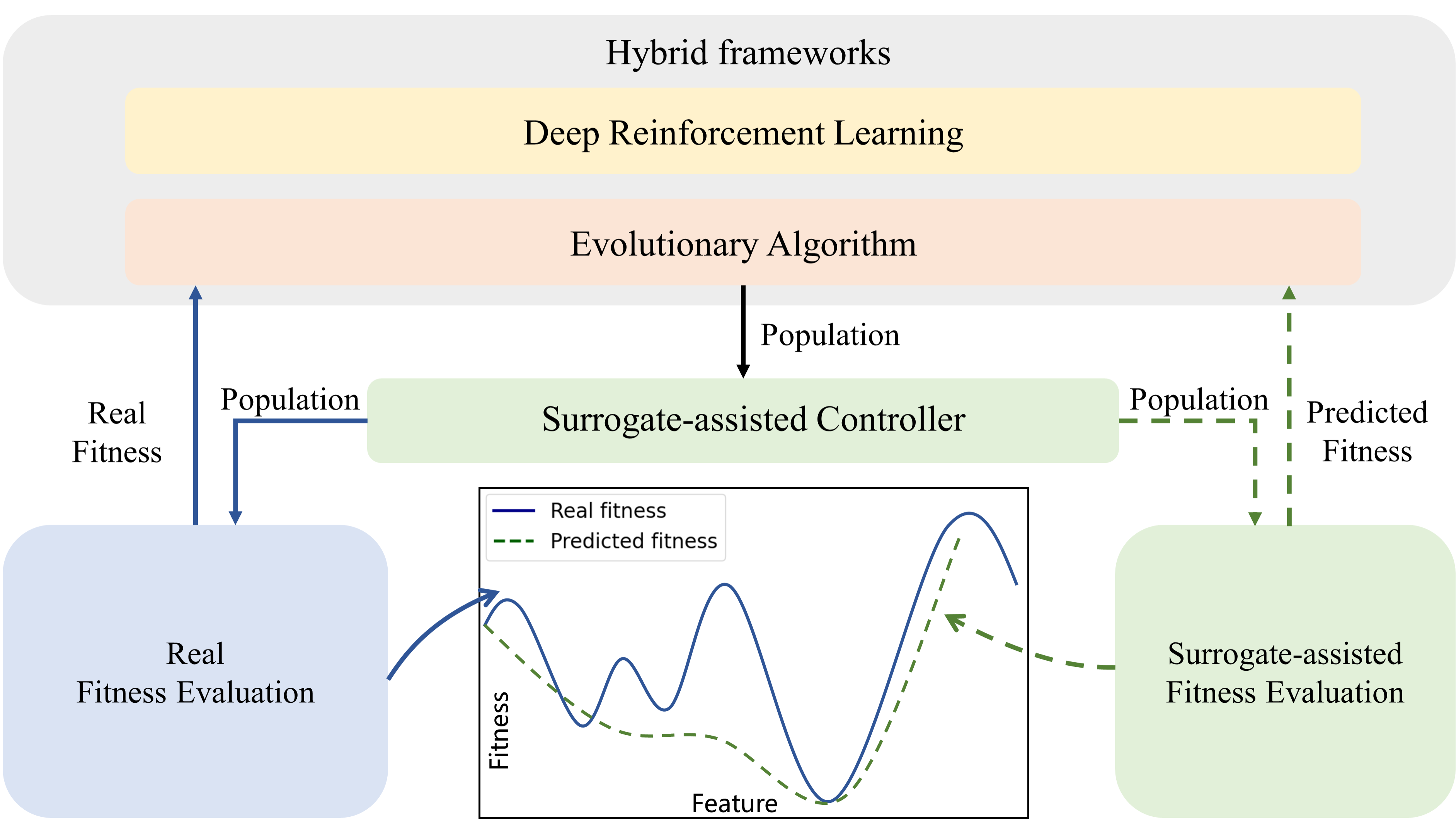 A surrogate-assisted controller for expensive evolutionary reinforcement learningInformation Sciences (InS), 2022
A surrogate-assisted controller for expensive evolutionary reinforcement learningInformation Sciences (InS), 2022








{kind=link}